
Produktmerkmale
Autonome Navigation, Fernüberwachung
Steuerung der Verbindung des Unterstützungssystems, genauer, zuverlässiger und automatisierter Betrieb
Datenvisualisierung und intelligente Vernetzung
SCADA Echtzeitüberwachung, visualisierte Betriebsdaten, intelligentes Management und bequeme Bedienung und Wartung
Leichtes Design, höhere Akkulaufzeit
Leichter Körper, der Komponentendruck und Reibung reduziert, um die Ausdauer zu verbessern
Brücken und Hindernisse überqueren, glatt und sicher
± 20° drehbarer Winkel, Anpassung an Bauteilwinkelabweichung, um glattes Überqueren von Brücken und Hindernissen zu erreichen
Sicher, stabil und zuverlässig in der Qualität
Korrosionsschutz und winddichtes Design, passend für kalte und hohe Temperaturen Umgebungen, kann Windgeschwindigkeiten bis zu 50m/s widerstehen
Getriebegetriebe, innovatives Design
Differenziertes Getriebedesign, reibungsloses Getriebe, geräuscharm, wartungsfrei
1/2

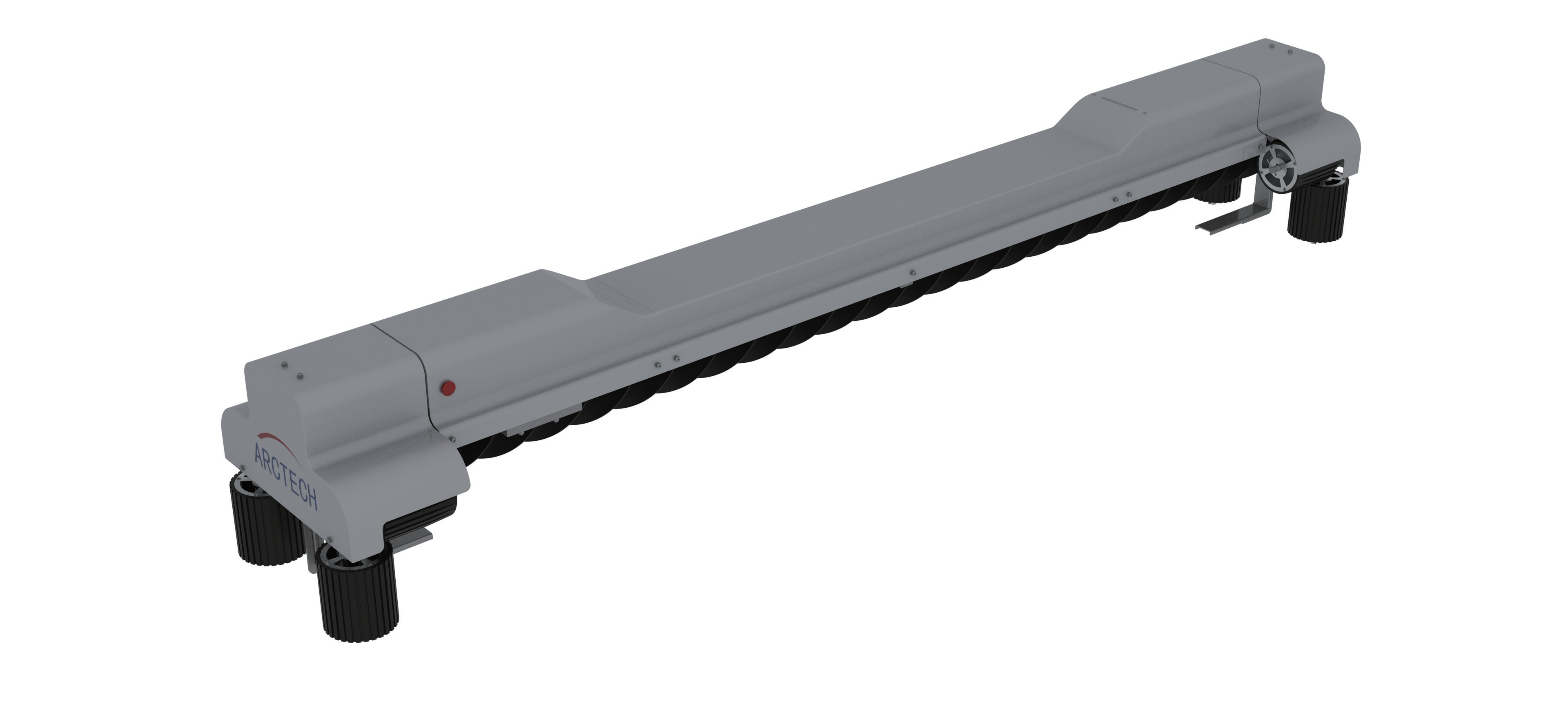
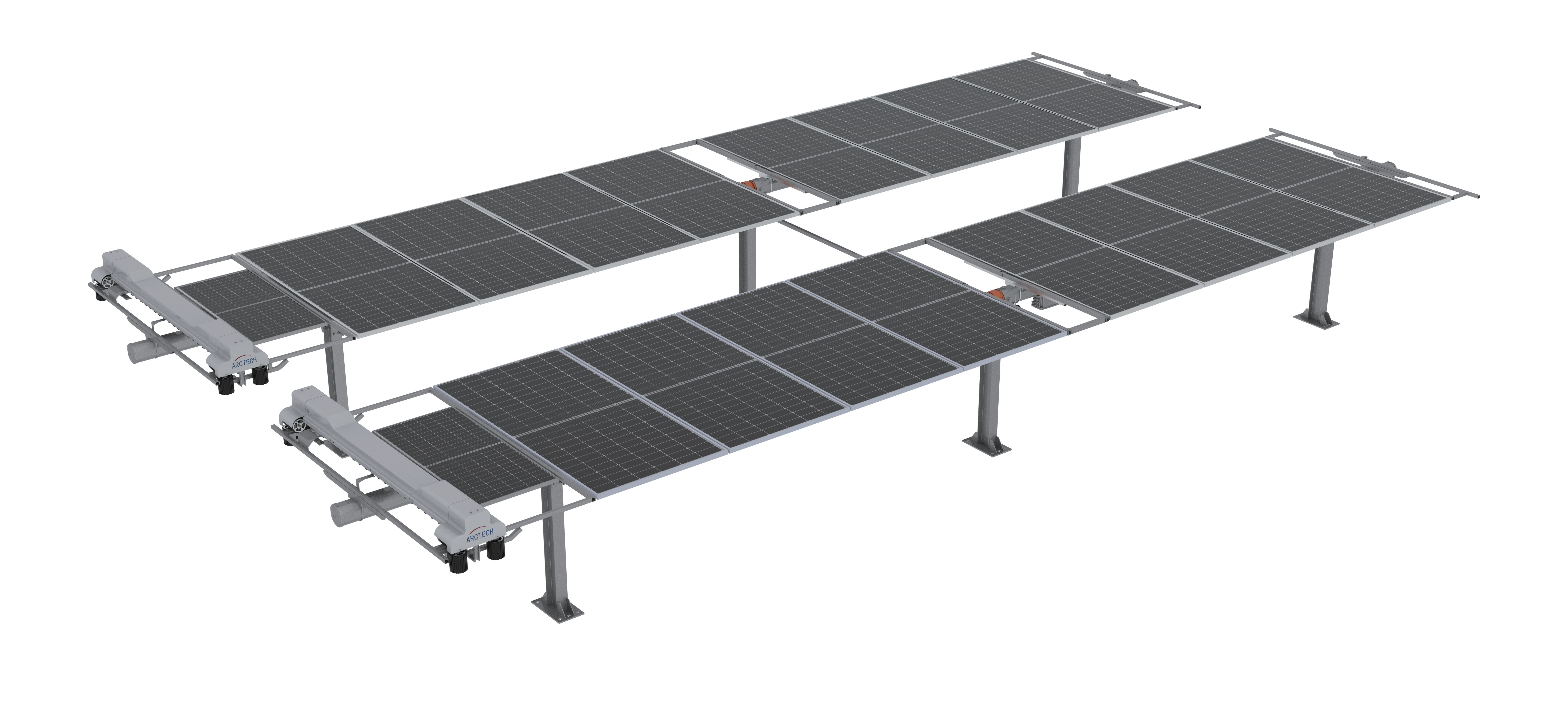
Intelligenter Photovoltaik Reinigungsroboter
Angebotsgespräch
China
190 Huayang Road, Lujia Town, Kunshan City
+86 0512-57351477
yehua.huang@arctechsolar.com
Produktbeschreibung
Strukturelle Parameter
|
Gesamtabmessungen |
2518mm*425mm*385mm |
Die Gerätegröße kann entsprechend der Länge der Komponenten angepasst werden. |
|
Gesamtgewicht der Maschine |
35±1.5KG |
Effektiv den Druck auf Komponenten reduzieren |
|
Reinigungsmodus |
Regelmäßige chemische Reinigung ohne Wasser |
Reinigungseffizienz≥99.5% |
|
Reinigungsabstand |
Maßgeschneidert nach dem Projekt |
Bestimmen Sie den Betriebsabstand basierend auf der Batteriekapazität. |
|
Kehrgeschwindigkeit |
10-18m/min |
Einstellbare Drehzahl |
|
Reinigungswinkel |
10-30° |
Stellen Sie den Reinigungswinkel entsprechend den Projektvorgaben ein |
|
Höhe des Hindernisübergangs |
≤50mm |
Befriedigen Sie den Höhenfehler des Reinigungsweges |
|
Drehwinkel |
±20° |
Erfüllen Sie den Verdrehwinkelfehler des Reinigungsweges |
|
Steigwinkel |
20° |
Kann sich dem Aufstieg von 20° anpassen, empfohlen, weniger als 10° |
|
Betriebsgeräusche |
Unter 60 Dezibel |
Getriebe, reibungslose Koordination |
|
Arbeitsgeschwindigkeit |
≤15m/s,Wind unter Niveau 7 |
Auf der Abschaltplattform kann es Windgeschwindigkeiten bis zu 50m/s standhalten |
|
Arbeitsumfeld |
Temperatur: -20 ℃ -60 ℃ |
Kann sich an kalte und hohe Temperaturbereiche anpassen |
|
Hilfskonstruktion |
Einschließlich feststehender/teleskopierbarer Kabeltrassen, Abschaltplattformen und sonstiger Hilfseinrichtungen |
Vorgeschlagener Bauteilspalt: ≤ 20mm |
Parameter der elektronischen Steuerung
|
Arbeitsspannung |
24V |
|
Arbeitsstrom |
2-3A |
|
Batteriekapazität |
10Ah~24Ah |
|
Stromversorgungsmodus |
Aufladung von Kontakten auf der Abschaltplattform |
|
Kommunikation des Halterungssystems |
Modbus TCP Protokoll (Backend Docking) |
|
Kommunikationsdesign |
LoRawan drahtlose Kommunikation |
Andere Produkte

Angebotsgespräch
Tianrou Flexibles Nachführsystem
Angebotsgespräch
Tianju Tower Thermal Dual Axis Tracking System
Angebotsgespräch
Tianrou-Ⅱ Flexible Halterung
Angebotsgespräch
Wasserstofferzeugungssystem für Laboratorien
Angebotsgespräch
Yi+drei Zimmer integriertes Design
Angebotsgespräch
Tianshuang flaches einachsiges Nachführsystem
Angebotsgespräch
Tianlai doppelreihiges Gestänge flaches einachsiges Nachführsystem
Angebotsgespräch
Tianji II Flaches einachsiges Nachführsystem
Angebotsgespräch
Intelligenter Photovoltaik Reinigungsroboter für Qinghui Pro
Angebotsgespräch
Intelligenter Photovoltaik Reinigungsroboter für Qinghui
Angebotsgespräch
Tianzhi II Verfolgungssystem
Angebotsgespräch
Wasserstoffproduktionssystem für Elektrolytzelle
relevante Produkte
12 kW Split-Phase-Hybrid-Wechselrichter v1.4
Angebotsgespräch
R-9 Hochenergiekabel-Fehlerortungsgerät
Angebotsgespräch
Intelligenter Photovoltaik Reinigungsroboter für Qinghui
Angebotsgespräch
Unterstützungssystem
Angebotsgespräch
Neue Energie (Chemie) -Intelligentes PV-Betriebs- und Wartungssystem
Angebotsgespräch
Solarbox-Wechselrichterstation
Angebotsgespräch
N-Typ TOPCon Einzelkristallzelle 182-16BB
Angebotsgespräch
Intelligenter Sicherheitsschutz
Angebotsgespräch
Weiches Pack Polymer Super Faraday Kondensator Batterie 4.2V 21000F Energiespeichermodul ohne Entwurfssicherheitsprüfung, keine Explosion, kein Feuer
35 /PCS/sample