

Ein Studententeam hat in Zusammenarbeit mit Daniel Seita, Assistenzprofessor für Informatik an der University of Southern California, Viterbi, die MOTIF-Hand entwickelt – eine Roboterhand mit multimodalen Sensorfunktionen. Diese Roboterhand misst nicht nur Tiefe, Kraft und Temperatur, sondern kann auch die menschliche Temperaturwahrnehmung simulieren und die Temperatur von Objekten berührungslos erfassen. Dies stellt einen neuen Durchbruch in der Robotik dar.
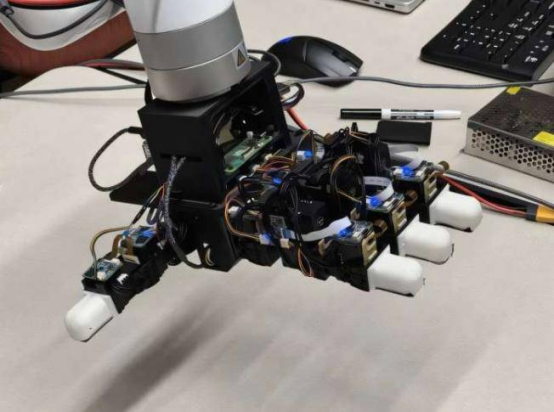
Das Design der MOTIF-Hand ist von der instinktiven menschlichen Wahrnehmung von Temperatur und Kraft inspiriert. Integrierte Tiefen-, Kraft- und Temperatursensoren ermöglichen es ihr, ihre Umgebung wie ein Mensch wahrzunehmen und darauf zu reagieren. Professor Daniel Seita erklärte: „In Fabriken und anderen Bereichen benötigen Roboter eine präzise Kraftkontrolle. Dieser Kraftsensor überprüft, ob die vom Roboter angewendete Kraft angemessen ist.“ Darüber hinaus ermöglicht eine in der Handfläche integrierte Wärmebildkamera die berührungslose Temperaturmessung und erhöht so die Betriebssicherheit erheblich.
Die Forschungsarbeit des Teams mit dem Titel „MOTIF Hand: Eine multimodale, beobachtende Roboterhand basierend auf thermischen, inertialen und Kraftsensoren“ wurde auf dem Preprint-Server arXiv veröffentlicht. Mitautor Zhou Hanyang hebt hervor, dass das Design der MOTIF Hand auf dem menschlichen Verständnis von Krafteigenschaften beruht. Die integrierten IMU-Sensoren ermöglichen es dem Roboter, das Gewicht von Objekten durch leichtes Antippen oder Schütteln zu bestimmen und so die menschliche Wahrnehmung besser nachzuahmen. Dieses innovative Design verlängert nicht nur die Lebensdauer der Roboterhand, sondern eröffnet auch Potenzial für weiterführende Forschung im Bereich der Roboterhände.
Die MOTIF-Hand basiert auf der an der Carnegie Mellon University entwickelten LEAP-Hand und verfügt über zusätzliche, menschenähnliche Sensorfunktionen. Professor Daniel Seita erklärte, das Team engagiere sich für die Weiterentwicklung der Sensortechnologie und habe sich verpflichtet, die MOTIF-Hand als Open Source zu veröffentlichen, um den Fortschritt in der gesamten Robotik-Community zu fördern. Zhou Hanyang betonte: „Wir hoffen, dass weitere Forschungsteams diese Plattform nutzen können, um gemeinsam die Entwicklung der Robotik voranzutreiben.“
Weitere Informationen: Hanyang Zhou et al., „MOTIF Hand: Eine Roboterhand basierend auf thermischen, inertialen und Kraftsensoren für multimodale Beobachtung“, arXiv (2025). Zeitschrifteninformationen: arXiv