de.wedoany.com-Bericht: Das Forschungsteam um Professor Hu Qingsong von der China University of Mining and Technology (CUMT) hat in einem im Juni 2026 in der 4. Ausgabe der Fachzeitschrift „Industrie- und Bergbauautomatisierung" veröffentlichten Artikel ein innovatives Wahrnehmungskonzept vorgestellt, das Ultrabreitband (UWB)-Ortung mit LiDAR-Punktwolkentechnologie kombiniert. Durch das UWB-PU-VGAT-Erkennungsnetzwerk erreicht das System eine Erkennungsgenauigkeit von 90,23 % für untertägige unbemannte Fahrzeuge bei einer Bildrate von 32,3 Bildern pro Sekunde, was die Sicherheit und Echtzeitfähigkeit des autonomen Bergbaus erheblich verbessert und eine Schlüsseltechnologie für den Aufbau intelligenter Bergwerke darstellt.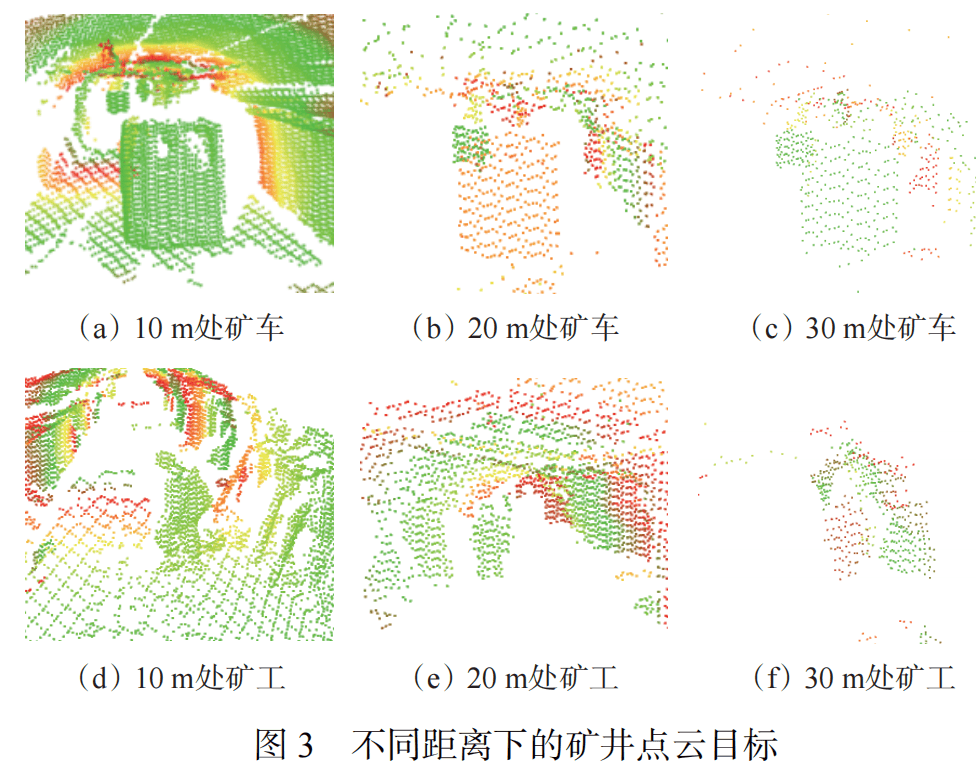
Um die branchentypischen Herausforderungen wie schlechte Lichtverhältnisse durch dunkle und staubige untertägige Strecken, einen geringen Anteil effektiver Ziele und spärliche Punktwolken auf große Entfernungen zu bewältigen, entwickelte das Team erfolgreich ein verbessertes voxelbasiertes Graph-Attention-Netzwerk. Dieses Netzwerk nutzt Module zur Merkmalsanreicherung und -kompensation, um die räumlichen Positionsbeziehungen innerhalb der Punktwolke tiefgehend zu analysieren. In Kombination mit einem Graph-Attention-Mechanismus und der Optimierung der Verlustfunktion durch Focal Loss werden die Probleme des starken Ungleichgewichts zwischen positiven und negativen Stichproben sowie der hohen Erkennungsfehler auf große Entfernungen wirksam gelöst. In Tests, die ausschließlich LiDAR verwendeten, erreichte das VGAT-Netzwerk eine durchschnittliche Erkennungsgenauigkeit von 83,17 % für Grubenwagen und 78,54 % für Bergleute und übertraf damit in der Gesamtgenauigkeit mehrere gängige Algorithmen.
Um die Herausforderung der Fernerkennung weiter zu bewältigen, nutzte das Team geschickt das in Bergwerken bereits weit verbreitete UWB-Ortungssystem. Das System verwendet die von UWB bereitgestellten Echtzeitpositionen als Vorabinformationen, grenzt Zielbereiche ein und schneidet die LiDAR-Punktwolke automatisch zu, um irrelevante Hintergrunddaten zu filtern. Dadurch wird der Erkennungsbereich erheblich verkleinert und der Rechenaufwand reduziert. Gleichzeitig ist das Netzwerk mit einer Punktwolken-Upsampling-Technologie (Grad-PU) ausgestattet, um das Problem spärlicher Punktwolken auf große Entfernungen zu lösen. Diese Technologie kann unvollständige Punktwolken aus einer Entfernung von über 30 Metern um das Vierfache vervollständigen und rekonstruieren, wodurch spärliche Punktwolken in hochdichte, vollständige Punktwolken umgewandelt werden und entfernte Bergleute sowie Grubenwagen klar „sichtbar" werden.
Die Technologie wurde im Wuzhuang-Eisenerzbergwerk der Xuzhou Iron and Steel Group vor Ort getestet. Als untertägiges Bergwerk mit einer jährlichen Eisenerzproduktion von 500.000 Tonnen treibt das Wuzhuang-Bergwerk seit Jahren die intelligente Transformation voran, die auf „Mechanisierung als Ersatz für manuelle Arbeit und Automatisierung zur Personalreduzierung" abzielt. Die Testergebnisse zeigen, dass das UWB-PU-VGAT-Netzwerk eine durchschnittliche Erkennungsgenauigkeit von 90,23 % für Grubenwagen und 83,67 % für Bergleute erreicht, was einer Steigerung von 6,09 % gegenüber dem Basisnetzwerk entspricht. Mit einer Bildrate von 32,3 Bildern pro Sekunde übertrifft es die Echtzeitanforderungen für unbemannte Fahrzeuge unter Tage (10 bis 30 Bilder pro Sekunde) deutlich. Das System kann sich flexibel an verschiedene Streckenformen wie gerade Strecken, Abzweigungen und Kurven anpassen und Ziele auch unter Bedingungen teilweiser Verdeckung stabil erkennen.
Professor Hu Qingsong ist Doktorvater an der China University of Mining and Technology und forscht seit langem schwerpunktmäßig an Kernbereichen der intelligenten Bergbautechnologie, darunter präzise Ortung, Fahrzeugvernetzungskommunikation und multimodale Wahrnehmung. Er leitet ein Projekt des National Natural Science Foundation of China (Allgemeines Programm). Die technologischen Errungenschaften des Teams bieten vielversprechende neue Lösungsansätze für die langjährigen Herausforderungen der Umgebungswahrnehmung im Bereich des unbemannten Fahrens unter Tage.
Dieser Artikel wurde von Wedoany übersetzt und bearbeitet. Bei jeglicher Zitierung oder Nutzung durch künstliche Intelligenz (KI) ist die Quellenangabe „Wedoany“ zwingend vorgeschrieben. Sollten Urheberrechtsverletzungen oder andere Probleme vorliegen, bitten wir Sie, uns unverzüglich zu benachrichtigen. Wir werden den entsprechenden Inhalt umgehend anpassen oder löschen.
E-Mail: news@wedoany.com