

Ingenieuren der UCSD ist kürzlich ein Durchbruch gelungen: Sie haben eine neue Generation tragbarer Systeme entwickelt, die dehnbare Elektronik mit künstlicher Intelligenz kombinieren, um Maschinen in dynamischen Umgebungen zuverlässig per Gestensteuerung zu bedienen. Die Forschungsergebnisse wurden in *Nature Sensors* unter dem Titel „Noise-resistant human-machine interface based on deep learning-enhanced wearable sensors“ veröffentlicht. Dieses tragbare System löst eine langjährige Herausforderung im Bereich tragbarer Technologien: die zuverlässige Erkennung von Gestensignalen in realen Umgebungen.
Laut Xiangjun Chen, einem der Erstautoren der Studie und Postdoktorand am Department of Chemistry and Nanoengineering der Jacobs School of Engineering der UCSD, funktionieren herkömmliche tragbare Technologien zwar gut, solange sich der Nutzer nicht bewegt, doch werden die Signale leicht durch Bewegungsgeräusche gestört, was ihre Alltagstauglichkeit einschränkt. Das System der neuen Generation integriert künstliche Intelligenz und kann so in Echtzeit Störsignale aus Sensordaten filtern. Dadurch werden Gestensignale auch bei schnellen Bewegungen oder in komplexen Umgebungen präzise erkannt. Diese Eigenschaft macht das System vielversprechend für Anwendungen in verschiedenen Bereichen, darunter Industrie, Rettungswesen, Tauchen und Unterhaltungselektronik. Beispielsweise können Rehabilitationspatienten oder Menschen mit Mobilitätseinschränkungen robotische Assistenzsysteme mit natürlichen Gesten steuern; Industriearbeiter und Rettungskräfte können Werkzeuge und Roboter in schnellen oder gefährlichen Umgebungen freihändig bedienen; und Taucher und Fernbediener können Unterwasserroboter in turbulenten Gewässern steuern.
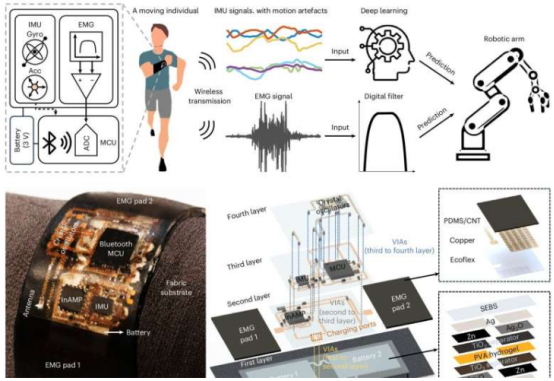
Das System besteht aus einem flexiblen elektronischen Patch, der an einem Stoffarmband befestigt ist und Bewegungs- und Muskelsensoren, einen Bluetooth-Mikrocontroller und einen dehnbaren Akku integriert. Mithilfe eines eigens entwickelten Deep-Learning-Frameworks erfasst und verarbeitet das System Signale vom Arm, entfernt Störungen, interpretiert Gesten und sendet Befehle zur Steuerung der Maschine in Echtzeit. In Tests unter verschiedenen dynamischen Bedingungen steuerten Probanden mit dem Gerät den Roboterarm während des Laufens, bei hochfrequenten Vibrationen und unter verschiedenen Störbedingungen. Die Ergebnisse zeigten eine präzise und latenzarme Leistung. Darüber hinaus wurde das Gerät in einer simulierten Meeresumgebung validiert, wo es ebenfalls hervorragende Ergebnisse erzielte.
Weitere Informationen: Xiangjun Chen et al., „Noise-resistant Human-Machine Interfaces Based on Deep Learning-Enhanced Wearable Sensors“, *Nature Sensors* (2025). Zeitschrifteninformationen: *Nature Sensors*