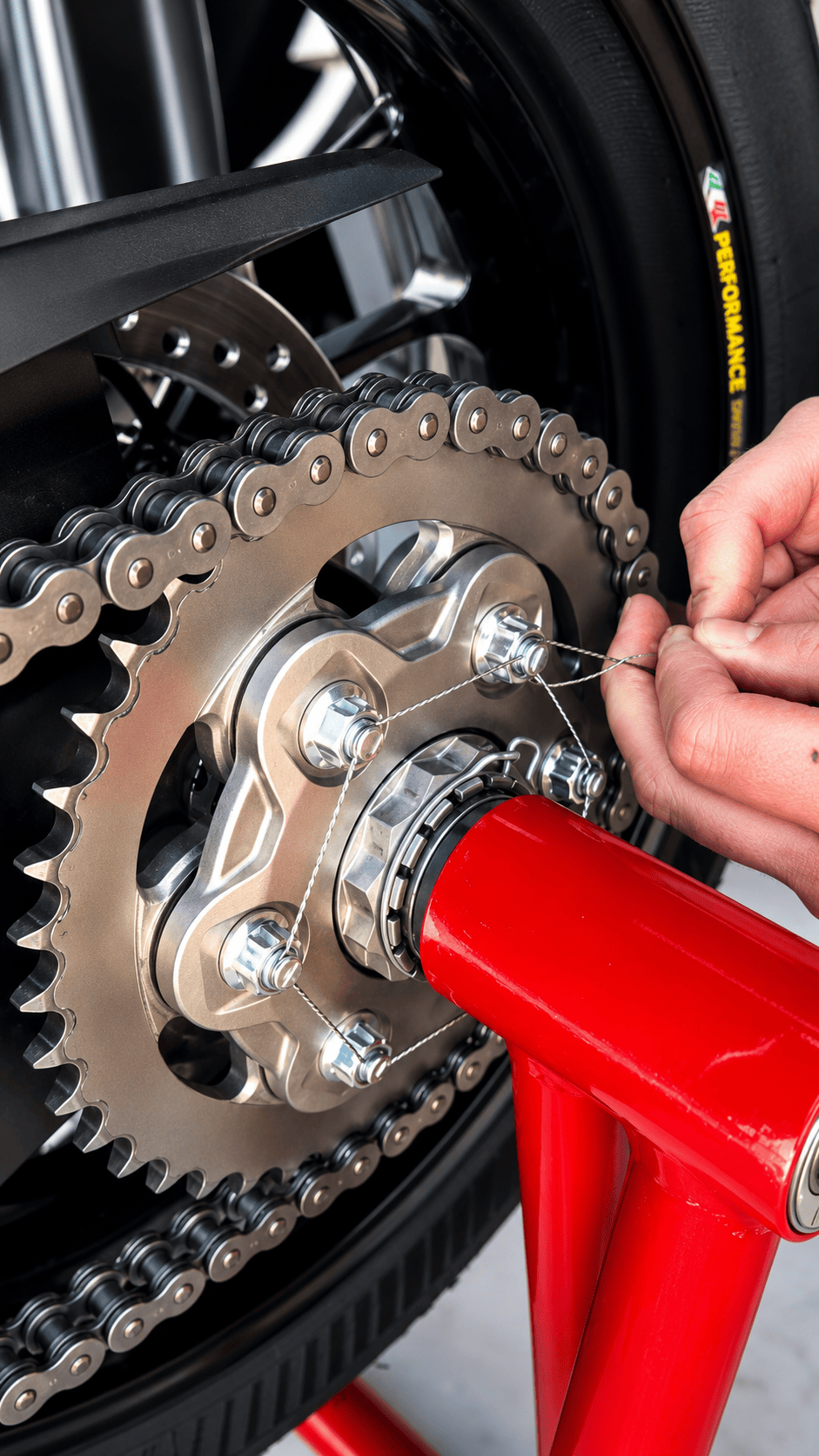
de.wedoany.com-Bericht: LinkerBot ist ein 2023 gegründetes chinesisches Unternehmen für geschickte Roboterhände. Das Unternehmen stellt keine kompletten humanoide Roboter her, sondern entwickelt die Roboterhand als eigenständiges Produkt. Die geschickte Hand von LinkerBot verfügt über ein Fünf-Finger-Design mit mehreren Gelenken und kann feine Tätigkeiten wie Klavierspielen, Einfädeln, Schrauben und die Montage elektronischer Produkte ausführen. Auf dem chinesischen Markt liegt der Mindestpreis für solche Produkte bei etwa 600 US-Dollar, und das Unternehmen baut seine Produktionskapazitäten aus.
Humanoide Roboter sind in den letzten Jahren häufig bei Vorführungen wie Frühlingsfest-Galas, Vorwärtssaltos, Rückwärtssaltos und Marathonläufen zu sehen gewesen, was Fortschritte in der Bewegungssteuerung und der Integration ganzer Systeme zeigt. Damit Roboter jedoch tatsächlich in Fabriken, Lagerhäuser und Servicebereiche vordringen können, müssen sie letztlich konkrete Aufgaben ausführen: Teile greifen, Steckverbindungen herstellen, Schrauben anziehen, Gegenstände sortieren, Knöpfe drücken und Werkzeuge ordnen. Die Beine bringen den Roboter zum Einsatzort, die Hände führen die eigentlichen Aktionen aus.
LinkerBot erregt nicht nur wegen seines Preises Aufmerksamkeit, sondern auch, weil es zeigt, dass geschickte Hände von der Kleinserien-Prototypenphase in eine kostengünstige, massenproduktionstaugliche Komponentenphase übergehen. Wenn geschickte Hände in mehr Roboter integriert werden sollen, werden Sensoren, Motor-Treiber-Chips, Verbindungslösungen, Stromversorgungs-Chips und Temperaturüberwachungsfunktionen die Stabilität ihrer Arbeit bestimmen.
Eine Roboterhand kann sich beim Greifen nicht allein auf das Sehen verlassen. Sie muss erfassen, ob die Finger ein Objekt berühren, ob die Kraft angemessen ist, ob das Objekt rutscht und wie sich die Motorlast verändert. Druck-, Tast-, Vibrations-, Positions-, Haltungs-, Strom- und Temperatursignale fließen gemeinsam in das Steuerungssystem ein und helfen bei der Entscheidung, ob die Kraft erhöht, verringert oder gestoppt werden soll.
Analog Devices, Inc. (ADI) erwähnt in seinen Materialien zu geschickten Roboterhänden Komponenten wie Drucksensoren, Vibrationssensoren, Mikrofone, 3D-indirekte Flugzeitmodule (iToF) und Trägheitsmesseinheiten (IMU). Diese Komponenten erfassen jeweils Kontakt, Rutschen, Geräusche, Entfernung und Haltungsänderungen, sodass die geschickte Hand nicht nur visuell den Zustand eines Objekts beurteilt, sondern auch mehr Kontaktinformationen an das Steuerungssystem zurückmelden kann.
Melexis arbeitet mit OYMotion an der Weiterentwicklung des Tactaxis 3D-Tastsensors, der die Kraft- und Verformungsrückmeldung nach dem Kontakt der Finger mit einem Objekt übernimmt. Melexis zufolge ist Tactaxis für Industrieroboter und humanoide Roboter konzipiert und verwendet ein kompaktes 3D-Tastsensordesign. Ziel ist die Entwicklung eines Fingerspitzenmoduls, das sich für die Integration in Roboterhände und die Massenproduktion eignet.
Mit der zunehmenden Anzahl von Sensoren und Aktuatorknoten wird die Verbindung zu einer Herausforderung für die Massenproduktion. Im Inneren einer geschickten Hand befinden sich mehrere Sensoren, kleine Motoren und Aktuatorknoten. Die Vereinfachung der Kabelbäume, die Verbindungsart der Knoten sowie die Fähigkeit, Strom und Daten bis zu den Fingerspitzen zu übertragen, beeinflussen die Montageeffizienz und die langfristige Zuverlässigkeit.
Die E2B-Zweidraht-Verbindungslösung von Analog Devices (ADI) wurde für solche Verkabelungsprobleme entwickelt. Der AD3306 unterstützt 10BASE-T1S und kann Daten und Strom über dasselbe Kabelpaar übertragen. Der AD3301 ist für Sensor- und Aktuatorschnittstellen ausgelegt und kann gängige Schnittstellen wie SPI, I2C, UART, PWM und GPIO verbinden. Der Wert solcher Komponenten liegt darin, die Verkabelung an den Endknoten zu reduzieren, ohne dass zusätzliche Schnittstellenplatinen erforderlich sind, wodurch die Übertragung von Daten und Strom zu den Sensoren und Aktuatoren in den Fingern und der Handfläche vereinfacht wird.
Neben der Verkabelung ist auch der Motorantrieb entscheidend. Im Inneren einer geschickten Hand gibt es viele kleine Motoren auf engem Raum. Ob Aktionen wie Greifen, Drehen und Drücken stabil wiederholt werden können, hängt von der Leistung des Antriebs, der Stromabtastung und der Positionsrückmeldung ab.
Der TMC6460 von Analog Devices (ADI) ist für die Steuerung kleiner Servomotoren ausgelegt und integriert einen FOC-Controller, eine Leistungsstufe, Strommessung und Rückkopplungs-Engine in einem einzigen Chip. Aufgrund des begrenzten Platzes und der vielen Motoren in einer geschickten Hand gilt: Je kompakter der Treiber, desto stabiler sind die Stromabtastung und die Steuerungsreaktion, und desto leichter lässt sich die Konsistenz der Handbewegungen gewährleisten.
Mit der zunehmenden Anzahl von Motoren und Antriebsknoten steigen die Anforderungen an die Stromversorgung, weshalb die 48V-Stromversorgung nach und nach in mehr Roboterdesigns Einzug hält. Die Materialien von Allegro zu 48V-Roboteraktuatoren befassen sich mit der 48V-Stromversorgung, dem Motorantrieb, der Strommessung und der Positionsrückmeldung und diskutieren Stromsensoren, Positionssensoren und Motorantriebe gemeinsam im Robotersystem.
Im Inneren einer geschickten Hand muss die 48V-Versorgung kontinuierlich Motorantriebe, Sensoren und Steuerungen mit Strom versorgen. Der begrenzte Raum erschwert die Wärmeableitung, und die Effizienz der Stromversorgung sowie die Rauschunterdrückung wirken sich direkt auf die Stabilität der gesamten Hand aus. Der LTC7891 von Analog Devices (ADI), ein GaN-Abwärtsregler, adressiert das Problem der effizienten Spannungsregelung und EMI-Kontrolle auf engem Raum. Sein Vorteil liegt in der Reduzierung von Verlusten, Wärmeentwicklung und der Größe externer Komponenten auf begrenztem Raum.
Neben der Stromversorgung muss auch die Temperatur überwacht werden. Im Inneren einer geschickten Hand sind Motoren, Stromversorgungen, Treiber und Sensoren integriert, was auf engem Raum zu konzentrierter Wärmeentwicklung führt. Temperaturänderungen beeinträchtigen gleichzeitig die Bewegungsstabilität und die Sensorgenauigkeit. Die Temperaturmess- und Wärmeerfassungskomponenten von Melexis können als Ergänzung für diese Rückmeldung dienen.
Mit dem Übergang geschickter Hände zur Massenproduktion werden die beteiligten Komponententypen immer klarer: Drucksensoren, Tastsensoren, Positionserkennung, Strommessung, Temperaturmessung, Mikrocontroller (MCU), Motorantriebe, Stromversorgungs-Chips, Steckverbinder und Schutzbauteile werden zu wichtigen Bestandteilen der Roboterhand.
Bei der künftigen Beobachtung der Roboterbranche sollte man nicht nur auf die Veröffentlichung ganzer Roboter achten, sondern auch darauf, ob die zugrunde liegenden Komponenten kostengünstig, zuverlässig und für die Massenproduktion geeignet sind. Für Halbleiterhersteller ist die Robotik keine leere Nische, sondern eine konkrete Chance für Sensoren, Motor-Treiber-Chips, Stromversorgungsmanagement und Verbindungslösungen, in neue Anwendungsbereiche vorzudringen.
Dieser Artikel wurde von Wedoany übersetzt und bearbeitet. Bei jeglicher Zitierung oder Nutzung durch künstliche Intelligenz (KI) ist die Quellenangabe „Wedoany“ zwingend vorgeschrieben. Sollten Urheberrechtsverletzungen oder andere Probleme vorliegen, bitten wir Sie, uns unverzüglich zu benachrichtigen. Wir werden den entsprechenden Inhalt umgehend anpassen oder löschen.
E-Mail: news@wedoany.com