de.wedoany.com-Bericht: Der Einstieg in die Roboter-Biegeautomatisierung kann mit dem Entnehmen von Teilen beginnen. Mike Ruediger, Senior Application Engineer für Robotik bei SafanDarley North America (mit Sitz in Waukesha, Wisconsin), gibt Werkstätten, die diese Technologie einführen möchten, schrittweise Empfehlungen. Das Bedienen einer Abkantpresse erfordert ein gewisses Geschick und ist nicht einfach nur ein Aufnehmen und Ablegen, aber die Arbeit ist repetitiv, insbesondere wenn die Stückzahlen steigen, und gute Bediener sind schwer zu finden. Körperlich anstrengende, sich wiederholende Aufgaben sollten nicht die Zeit von Facharbeitern in Anspruch nehmen.
Die Produktionsmenge ist ein entscheidender Faktor für die Automatisierung. Ruediger weist darauf hin, dass nicht alle Teile für die Automatisierung geeignet sind; die Effekte sind bei höheren Stückzahlen besser. Hohe Stückzahlen bedeuten nicht zwangsläufig große Lose; moderne Technologien ermöglichen durch segmentierte Einrichtung, automatischen Werkzeugwechsel und Offline-Simulation komplexe Teileflussstrategien, wie z. B. die kundenauftragsbezogene Fertigung. Die Automatisierung eignet sich auch für ähnliche Teilefamilien, wie z. B. Gehäuse, bei denen Programme für häufig bestellte spezifische Geometrien angepasst werden können. Für einmalige Prototypenteile könnte eine manuelle Abkantpresse jedoch besser geeignet sein.
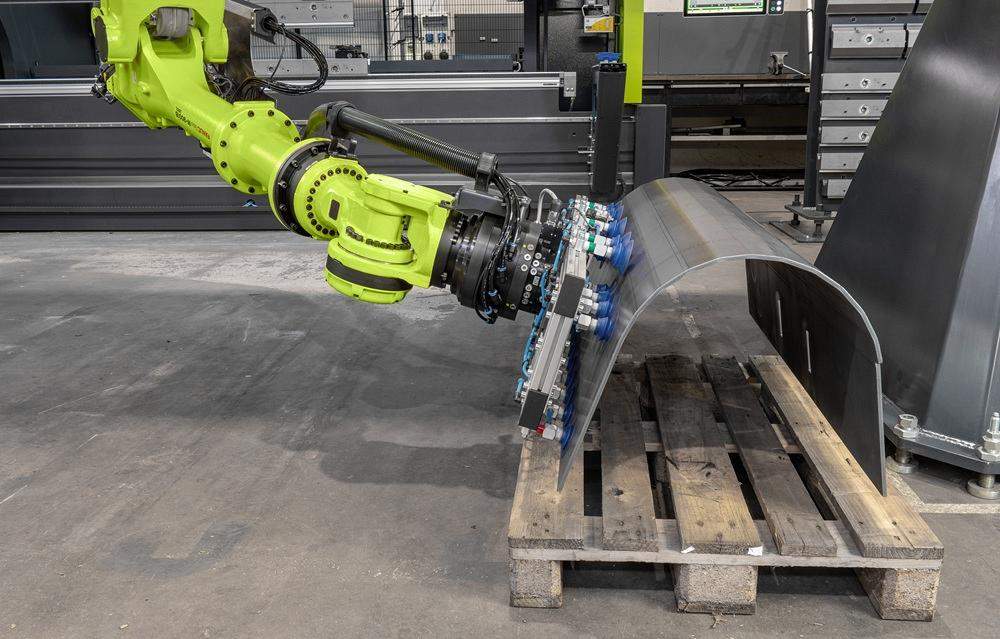
Die Teilegröße ist eine weitere wichtige Überlegung. Das Roboterbiegen zeichnet sich besonders bei der Verarbeitung von sehr kleinen und sehr großen Teilen aus. Kleine Werkstücke bergen an älteren Abkantpressen ohne moderne Sicherheitssysteme ein Quetschrisiko, während große Werkstücke den Arbeitskräftebedarf erhöhen und ergonomische Probleme mit sich bringen. Bediener ermüden beim Heben großer Bleche, was dazu führt, dass sie das Werkstück während des Biegevorgangs nicht vollständig stützen können, was die Wiederholgenauigkeit des Biegens beeinträchtigt.
Bei der Festlegung der Endeffektor-Strategie muss die Materialzusammensetzung der Werkstatt berücksichtigt werden, insbesondere der Anteil magnetischer Materialien. Für Aluminiumteile können nur mechanische Spannmittel wie Greifer und Saugnäpfe verwendet werden, Magnete sind nicht einsetzbar. Für magnetische Materialien wie Kohlenstoffstahl können magnetische Endeffektoren einzelne Bleche effektiv aus dem Stapel aufnehmen und Doppelblattentnahmen verhindern. Endeffektoren können auch Saugnäpfe mit mechanischen Greifern kombinieren, wobei die Greifer die Kante halten und die Saugnäpfe am Schwerpunkt greifen, um große Flansche zu stützen. Die Oberflächenbeschaffenheit des Werkstücks beeinflusst die Aufnahme; z. B. verstärkt Öl die Saugkraft, kann aber das Risiko des Verrutschens während des Biegens erhöhen. Für besondere Herausforderungen können kundenspezifische Konstruktionen entwickelt werden, z. B. der Einsatz von „Stift"-Endeffektoren, bei denen eine Gruppe von Stiften in Extrusionslöcher im Rohling eingeführt und gespreizt wird, um das Werkstück zu fixieren.

Die Art der Entnahme geformter Teile beeinflusst die Machbarkeit der Automatisierung. Für Teile, die sich nur schwer stapeln lassen, ist ein Förderband eine Option. Moderne Software kann die Verschachtelung und Rotation verschiedener Teile simulieren, sodass scheinbar nicht stapelbare Teile stabil gestapelt werden können. Die Biegezelle kann so ausgelegt werden, dass sie sowohl für den Abtransport mit Gabelstaplern als auch mit fahrerlosen Transportfahrzeugen geeignet ist.
Das Stapeln von Rohlingen ist in der Regel weniger problematisch, aber Rohlings mit geformten Konturen oder asymmetrischen Extrusionslöchern können Herausforderungen darstellen. Roboter-Biegezellen können solche Stapel verarbeiten, indem sie Versätze vorhersagen, sich in bestimmten Winkeln nähern und sich kurz vor dem vollständigen Anheben kurz bewegen, um ein sauberes Lösen zu gewährleisten.
Zu den Montagearten für Roboter gehören Portalroboter an der Decke und bodenmontierte Roboter. Portalroboter können schnell zur Seite gefahren werden, sodass die automatische Abkantpresse manuell bedient werden kann, sind jedoch bei der Handhabung bestimmter großer Werkstücke möglicherweise eingeschränkt. Bodenmontierte Roboter sind besser geeignet, um große Werkstücke mit langen Flanschen zu stützen. Bei Portalrobotern ist auch die Stapelhöhe der Teile zu berücksichtigen.

Zu den Zwischenschritten zur Gewährleistung der Prozesszuverlässigkeit gehört die präzise Messung der Teileposition; die meisten Biegezellen sind noch mit einer Ausrichtstation ausgestattet. Der Roboter kann dem Oberwerkzeug beim Rückhub folgen, um zu verhindern, dass der rückfedernde Flansch in einem tiefen Gänsehals-Oberwerkzeug hängen bleibt. Durch die Verwendung von gestuften Oberwerkzeugen, bei denen Biegungen mit unterschiedlichen Flanschspalten in einer Aufspannung zusammengefasst werden, kann der Werkzeugwechselbedarf reduziert werden. Bei Maschinen, die mit einem geeigneten Werkzeugmagazin und Werkzeugen mit New Standard-Zapfen ausgestattet sind, ist ein gestuftes Biegen möglich, sodass der Roboter das Teil nicht so oft wenden muss, um zum nächsten Werkzeugsatz zu wechseln.
Einige Biegezellen können mit Spezialwerkzeugen wie niederländischen Bördelbänken, Ein-Station-Bördelwerkzeugen oder Drehflügel-Drehwerkzeugen ausgestattet werden. Das Roboterbiegen kann auch Großradiusbiegungen und Inkrementalbiegungen durchführen. Ruediger erklärt, dass es ein sinnvoller Automatisierungsweg ist, vom Endpunkt auszugehen, d. h. mit der Betrachtung der Optionen zur Teileentnahme zu beginnen. Wenn die Stückzahl den Aufwand rechtfertigt und die fertigen Teile zuverlässig aus der Zelle entfernt werden können, wird das Roboterbiegen zu einer realistischen und praktikablen Option.
Dieser Artikel wurde von Wedoany übersetzt und bearbeitet. Bei jeglicher Zitierung oder Nutzung durch künstliche Intelligenz (KI) ist die Quellenangabe „Wedoany“ zwingend vorgeschrieben. Sollten Urheberrechtsverletzungen oder andere Probleme vorliegen, bitten wir Sie, uns unverzüglich zu benachrichtigen. Wir werden den entsprechenden Inhalt umgehend anpassen oder löschen.
E-Mail: news@wedoany.com