de.wedoany.com-Bericht: Ein Forscherteam des International Institute of Information Technology Hyderabad (IIIT-H) in Indien hat festgestellt, dass aktuelle KI-gestützte Verkehrsüberwachungskameras bei der Erkennung von Motorradfahrern systemische Mängel aufweisen, deren Ursache in der Form der zur Identifizierung von Objekten verwendeten Begrenzungsrahmen liegt. Um dieses Problem zu lösen, schlug das Team einen trapezförmigen Begrenzungsrahmen vor, der die Genauigkeit der Helmerkennung von 66,25 % auf 97,08 % und die Genauigkeit der Überladungserkennung von 36,70 % auf 78,34 % steigerte.
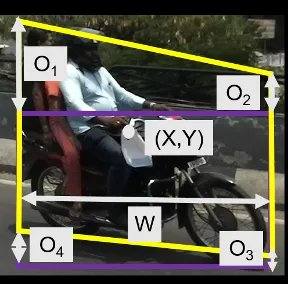
Herkömmliche Computer-Vision-Objekterkennungssysteme verwenden rechteckige Begrenzungsrahmen, die für konventionelle Fahrzeuge wie Autos und Lastwagen effektiv sind. Bei Motorrädern, insbesondere aus der bei Verkehrskameras üblichen Vogelperspektive, weist die Kontur des Fahrer-Motorrad-Gespanns jedoch eine trapezförmige Charakteristik auf – unten breit, oben schmal. Bei Verwendung eines rechteckigen Rahmens führt ein zu enger Rahmen zum Abschneiden des Lenkers oder des Fahrerkopfes – Schlüsselbereiche zur Beurteilung des Helmtragens –, während ein zu lockerer Rahmen leicht Hintergrundinformationen einbezieht, was zu Verwechslungen mit benachbarten Fahrzeugen führt. Diese Fehlerart wird als „falsche Nicht-Maximum-Unterdrückung“ bezeichnet und tritt besonders in Szenen mit dichtem Motorradverkehr und chaotischen Verkehrsbedingungen auf.

Das Forscherteam unter der Leitung von Aman Goyal, zu dem Dev Agarwal, Anbumani Subramanian, C.V. Jawahar, Ravi Kiran Sarvadevabhatla vom IIIT-H sowie Rohit Saluja vom IIT Kharagpur und IIT Mandi gehören, veröffentlichte die Studie auf dem CVPR-Workshop 2022 zur Wahrnehmung in unkontrollierten Umgebungen. Es führte eine neue geometrische Grundform namens „trapezförmige Fahrinstanzbegrenzung“ als Ersatz für den rechteckigen Rahmen ein. Dieses Trapez wird durch vier Versatzparameter definiert, sodass seine Grenzen dem tatsächlichen physischen Umriss des Motorrads aus der Kameraperspektive folgen können. Diese Innovation wurde patentiert (USPTO US 12.315.264, erteilt im Mai 2025) und dem iHub-Data-Forschungszentrum des IIIT Hyderabad zugeschrieben.
Das System wurde mit einer erweiterten Version des Indian Driving Dataset (IDD) trainiert, das die drei Kategorien „Helm getragen“, „Helm nicht getragen“ und „trapezförmige Fahrinstanzbegrenzung“ annotiert. Um das Problem verdeckter Soziusfahrer zu lösen, griff das Team auf die Technik des „amodalen Regressors“ aus der Fußgängererkennungsforschung zurück, die erstmals auf eine Motorrad-Pipeline angewendet wurde. Dieser Regressor kann vollständige vorhergesagte Begrenzungen für die Fahrer-Motorrad-Einheit generieren und die Anzahl der Insassen zuverlässig ableiten, selbst wenn Teile visuell verdeckt sind. Im Training wurde zudem ein „Curriculum Learning“-Ansatz verwendet, der die Klassenüberlappungsprobleme von einfachen zu schwierigen Fällen behandelt.

Die Pipeline des Forschungsteams wurde in Branchenmedien vorgestellt und wird derzeit als Teil des automatisierten Bußgeldverfahrens der indischen Stadtpolizei entwickelt. Das indische Smart Cities Mission umfasst bereits über 100 Städte mit integrierten Kommando- und Kontrollzentren (ICCC), die potenzielle Einsatzorte für automatisierte Verkehrsüberwachungssysteme sind. Laut einer Analyse der Weltbank kosten Verkehrsunfälle Indien jährlich 3 bis 7 % seines BIP. Im Jahr 2022 sagte die Weltbank speziell für die indische Verkehrssicherheits-infrastruktur 250 Millionen US-Dollar zu.
Die Bedeutung dieser Forschung geht über Indien hinaus. Die Studie weist darauf hin, dass globale Computer-Vision-Systeme für das Verkehrsmanagement hauptsächlich auf westlichen Straßen- und Verkehrsmustern basieren, während dichte, gemischte Verkehrsmuster in Entwicklungsländern weltweit häufiger vorkommen. Die Folgearbeiten des Teams erweitern das System von fest installierten Hochkameras auf Dashcams. Ihre 2025 veröffentlichte Arbeit „DashCop“ demonstriert die automatische Erstellung elektronischer Bußgelder auf Basis von Dashcam-Videos, um eine flächendeckende Durchsetzung im gesamten Straßennetz zu ermöglichen.

Das Forschungsteam ist der Ansicht, dass das technische Hindernis – die Erkennung auf ein vertrauenswürdiges Maß genau zu machen – für die Motorradverstoßerkennung und ähnliche dichte Szenarien gelöst ist. Was weiterer Untersuchung bedarf, ist die Frage, wie sich die rechtlichen und regulatorischen Rahmenbedingungen für KI-generierte Beweise entwickeln werden.



Dieser Artikel wurde von Wedoany übersetzt und bearbeitet. Bei jeglicher Zitierung oder Nutzung durch künstliche Intelligenz (KI) ist die Quellenangabe „Wedoany“ zwingend vorgeschrieben. Sollten Urheberrechtsverletzungen oder andere Probleme vorliegen, bitten wir Sie, uns unverzüglich zu benachrichtigen. Wir werden den entsprechenden Inhalt umgehend anpassen oder löschen.
E-Mail: news@wedoany.com