de.wedoany.com-Bericht: Der kritische Roboterarm „Canadarm2“ an der Internationalen Raumstation ist aufgrund eines defekten Handgelenkteils außer Betrieb genommen worden. Die Reparatur wird voraussichtlich mehrere Wochen in Anspruch nehmen. Das System klemmte am 27. Mai während der Routinearbeit. In einem Blogbeitrag vom 10. Juni gab die NASA bekannt, dass der Roboterarm am Handgelenk einen erhöhten Motorstrom aufwies und die Bewegung nicht wie erwartet erfolgte.
Der Roboterarm hatte im April gerade sein 25-jähriges Dienstjubiläum auf der Raumstation (ISS) gefeiert. Derzeit befindet er sich in einer stabilen Position, muss jedoch auf den für den 30. Juni geplanten Weltraumspaziergang warten. Nach Absprache mit der kanadischen Raumfahrtbehörde (CSA, die den Arm finanziert und seinen Betrieb mit MDA Space unterstützt) wurde entschieden, dass das betroffene Gelenk durch einen Weltraumspaziergang ausgetauscht werden muss. In einem Update auf der Website schrieb die CSA, dass Canadarm2 unter Berücksichtigung solcher potenziellen Probleme konstruiert wurde und aus mehreren Segmenten besteht, die im Weltraum ausgesteckt und ausgetauscht werden können. Da die Teile letztendlich ausgetauscht werden müssen, hat die CSA vorausschauend geplant und kritische Ersatzteile zur Raumstation geschickt. Im Jahr 2017 wurde eine ähnliche Reparatur an einer „Hand“ des Roboterarms durchgeführt, nachdem Anzeichen normaler Abnutzung aufgetreten waren. An Bord der Raumstation sind bereits Ersatzteile vorhanden.
Die NASA plant, an einem noch festzulegenden Datum eine Pressekonferenz abzuhalten, um über den Weltraumspaziergang zu diskutieren und weitere Informationen bekannt zu geben. Zwei Astronauten, die den Einsatz möglicherweise durchführen, stammen von der US-amerikanischen Seite der Raumstation, der Expedition 74 (Expedition 74)-Besatzung, darunter Chris Williams (NASA), Jessica Meir (NASA) und Jack Hathaway (NASA) sowie Sophie Adenot von der Europäischen Weltraumorganisation (European Space Agency, ESA).

Die Wiederherstellung des Betriebs von Canadarm2 ist entscheidend für das Andocken bestimmter Frachtraumschiffe an der Raumstation und für die Durchführung von Wartungsarbeiten am Orbitalkomplex. Diese Schiffe transportieren Nahrung, Ausrüstung und andere Vorräte für die Astronauten. Das letzte Andocken erfolgte im April, als Williams den Roboterarm steuerte und Hathaway Unterstützung leistete, um das Raumschiff Cygnus XL von Northrop Grumman einzufangen. Der Roboterarm war ursprünglich nicht für die Ankunft von Raumschiffen konzipiert, erreichte jedoch im Jahr 2024 seinen 50. „Kosmischen Fang“, obwohl er seit diesem Jahr bereits 10 Jahre über seine geplante Lebensdauer hinaus in Betrieb ist.
In den letzten Jahrzehnten wurde die Missionskontrolle zunehmend auf den Boden verlagert, einschließlich der NASA in Houston und des CSA-Hauptquartiers in der Nähe von Montreal, Québec. Allein die kanadischen Steuerungsoperatoren unterstützen jährlich über 100 Tage Arbeit für Canadarm2 und andere kanadische ISS-Roboter (einschließlich Dextre, der „Hand“ von Canadarm), darunter Aufgaben wie das Aufnehmen von Ausrüstung und den Transfer von Experimenten. Die Roboter der CSA auf der Raumstation repräsentieren ihren Anteil an der ISS-Finanzierungsvereinbarung, wodurch CSA-Astronauten und wissenschaftliche Projekte ins All fliegen können. Der nächste CSA-Astronaut, der dorthin reist, ist Josh Kutryk, der frühestens im September mit SpaceX‘ Crew-13 fliegen wird; der letzte war David Saint-Jacques in den Jahren 2018–19.
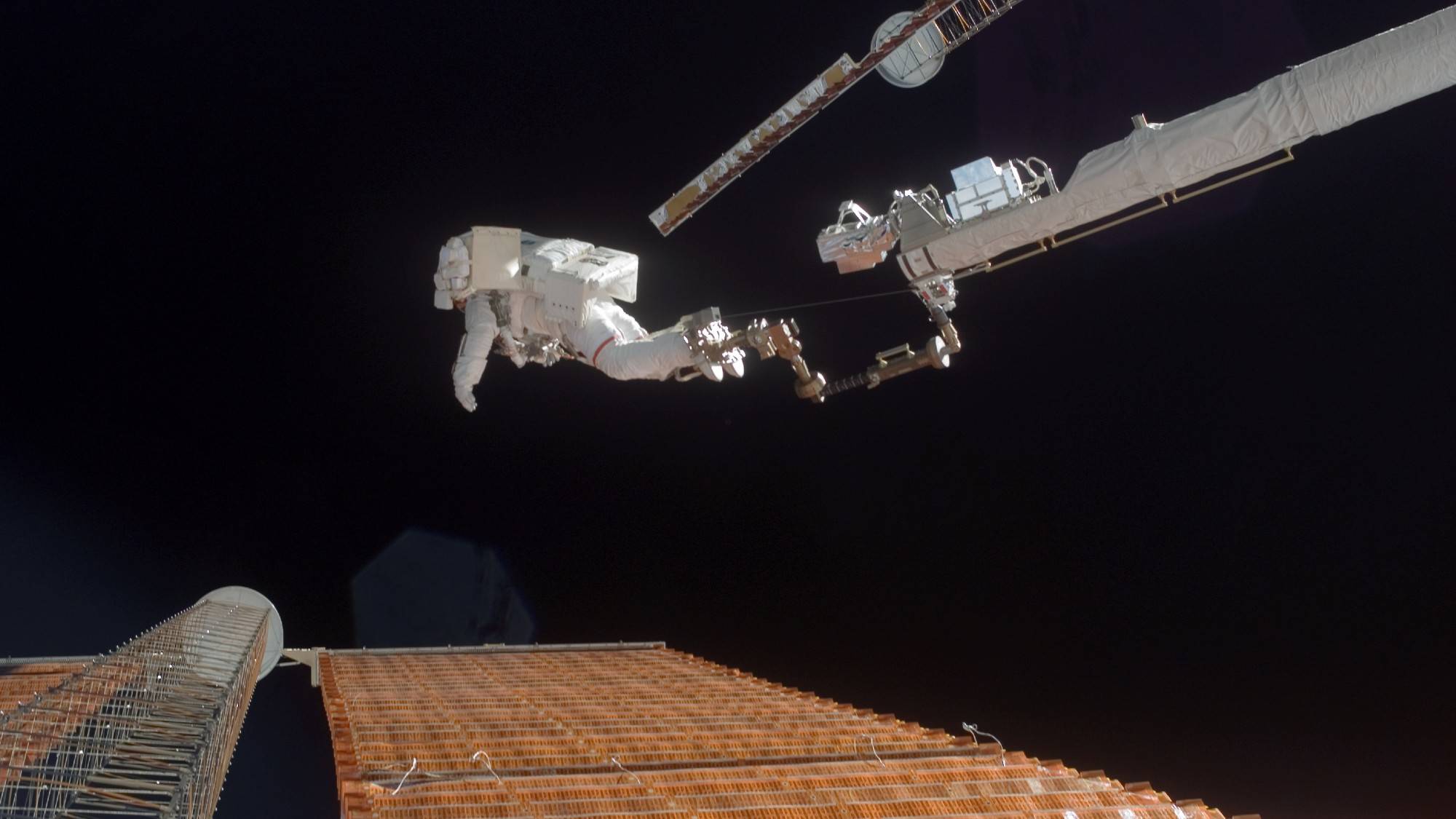
Canadarm2 ist Teil einer Reihe kanadischer Weltraumroboterarme, deren Ursprung teilweise auf Technologien des kanadischen National Research Council (Canada's National Research Council) zurückgeht, die einst frühe Satellitenantennen und die „Beine“ der Apollo-Mondlandefähre unterstützten. Der erste Canadarm flog 1981 während der zweiten Space-Shuttle-Mission der USA zum ersten Mal. Canadarm2 half beim Bau der ISS und unterstützt die Aktivitäten der Raumstation, während die nächste Generation, Canadarm3, für das Artemis-Programm gebaut wird, bei dem der CSA-Astronaut Jeremy Hansen im April mit Artemis 2 um den Mond flog. Einer der historisch bedeutendsten Momente von Canadarm2 war die Notfallreparatur eines eingerissenen Solarpanels im Jahr 2007, als der NASA-Astronaut Scott Parazynski auf dem Roboterarm und einer kanadischen Roboter-„Ausleger“-Verlängerung reiste, um das entfernte und stromführende Bauteil zu reparieren.
Dieser Artikel wurde von Wedoany übersetzt und bearbeitet. Bei jeglicher Zitierung oder Nutzung durch künstliche Intelligenz (KI) ist die Quellenangabe „Wedoany“ zwingend vorgeschrieben. Sollten Urheberrechtsverletzungen oder andere Probleme vorliegen, bitten wir Sie, uns unverzüglich zu benachrichtigen. Wir werden den entsprechenden Inhalt umgehend anpassen oder löschen.
E-Mail: news@wedoany.com